Termékprofilunkban elérhetőek olyan mozgásvezérlők, amelyek nincsenek felparaméterezve, azaz nem tartalmazzák azokat a paramétereket, amely a lineáris hajtások mozgatását lehetővé tennék.
Az SMC a lineáris hajtásokat és a mozgásvezérlőket alap esetben egy készletben szállítja. A termékeken lévő cikkszámokból/típusjelzésekből egyértelműen kiderül, hogy adott lineáris hajtáshoz melyik mozgásvezérlő tartozik és fordítva. Azonban, ha valamilyen oknál fogva vezérlőt kell cserélni, vagy a meglévő vezérlőt egy új lineáris hajtáshoz szeretnénk használni, át kell írnunk a vezérlő bizonyos paramétereit.
Ezen esetek megkönnyítésére termékprofilunkban elérhetőek olyan mozgásvezérlők, amelyek a lineáris hajtások mozgatását lehetővé tevő paramétereket nem tartalmazzák, azaz nincsenek felparaméterezve.
Honnan lehet tudni, hogy egy fel nem paraméterezett mozgásvezérlővel van dolgunk? Úgy azonosítható, hogy az eszköz oldalán található ezüstszínű címkén a típusjelzés LEC vagy a JXC karakterekkel kezdődik, és a –BC karakterekkel végződik. Ebben az esetben a mozgásvezérlő üres, nem tartalmaz paramétereket.
Tudok-e kárt okozni azzal, hogy nem üres, hanem felparaméterezett mozgásvezérlőt paraméterezek át? Nem. A már felparaméterezett mozgásvezérlőt nem lehet újraparaméterezni, a szoftver érzékeli az adatokat és nem engedi átírni azokat.
Az üres mozgásvezérlő felparaméterezéséhez az alábbiak szükségesek
-
Töltse le az ACT Controller 2 ingyenes szoftvert a BC vezérlő felparaméterezéséhez és az elektromos hajtás kezeléséhez az alábbi linken: ACT Controller 2 , majd telepítse fel.
-
Ha nem rendelkezik vele, rendelje meg a vezérlőre csatlakozáshoz szükséges programozó kábel kitet: JXC-W2A
-
Helyezze áram alá a vezérlőt. Az elektromos bekötéshez a JXC vezérlő kezelési útmutatójában talál bővebb információkat: JXC Kezelési útmutatók
-
Csatlakoztassa a JXC-W2A programozó kábelt
-
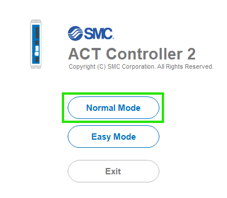
Indítsa el az ACT Controller 2 szoftvert
-
Válassza a „Normal mode” működési módot
-
Ha sikeresen csatlakozott a vezérlőre, akkor az „Alarm” gomb mellett látnia kell a vezérlő típusát: JXC*-BC
-
Kattintson a menüsorban a „Data writing tool for JXC-BC” opcióra

-
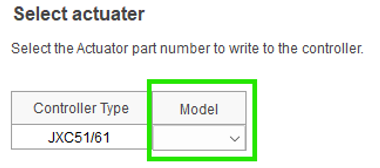
A felugró ablakon kattintson az „OK” gombra, majd a „Next” gombra és elkezdheti a hajtás paramétereinek a megadását
-
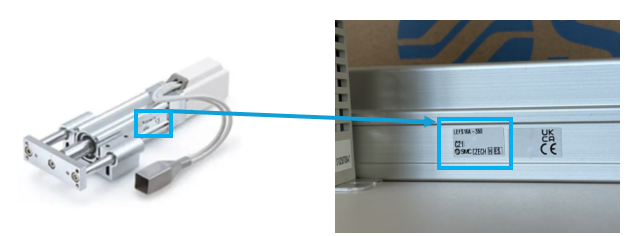
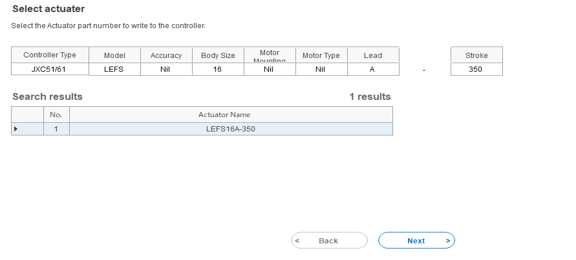
A szükséges paramétereket a lineáris hajtás oldalán található ezüst színű címkéről lehet leolvasni. Jelen esetben ez: LEFS16A-350
-
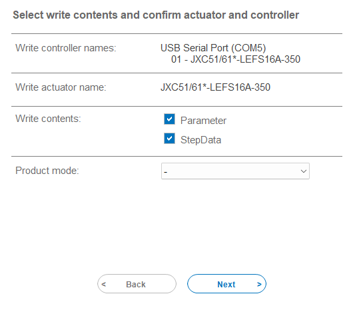
Miután kiválasztottuk a megfelelő aktuátort, kattintsunk a „Next” gombra:
-
A következő ablakban a „Parameter” pontot mindenképp be kell pipálnunk. A „Next” gombra kattintás után a „Confirm” felugró ablakban megjelenő figyelmeztető szöveget is nyugtázzuk az „OK” gomb megnyomásával és elkezdődik a vezérlő felparaméterezése.
Ha kész a folyamat, akkor ne felejtsük fel felcímkézni a vezérlőt, hogy milyen aktuátorhoz való, majd áramtalanítsa a vezérlőt és 5 másodperc elteltével helyezze ismét áram alá.
Ezzel kész elkészült egy Blank Controller felparaméterezése.
Ha az áramtalanítás után ismét csatlakozni szeretnénk a vezérlőhöz, akkor az „Options” – „Reconnection” menüpontban elérhető.
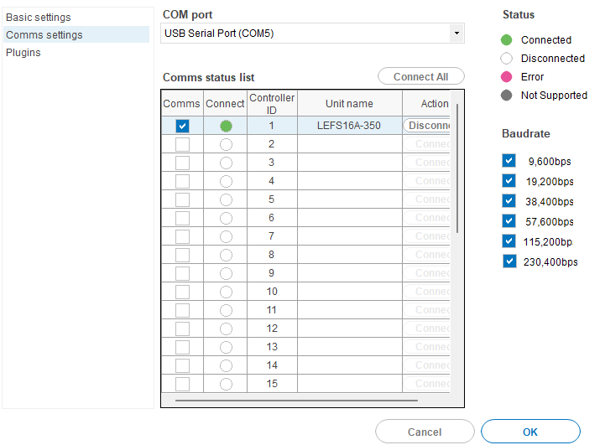
Amennyiben a Windows megváltoztatja a COM portot, úgy az „Options” – „Setup” – „Comms settings” menüpontban van lehetőség más COM port opciót választani.
Ha elkészült a felprogramozott vezérlő üzembe helyezésével, akkor érdemes biztonsági mentést készíteni, hogy ha cserélni kell a vezérlőt, akkor a biztonsági mentés visszatöltésével egyszerűen és gyorsan üzembe helyezhető legyen a csere vezérlő.
Ehhez szükséges letölteni a Data writing tool – JXC-BCW miniprogramot.
A megnyíló ablakban az „Agree”-vel fogadjuk el a felhasználási feltételeket, a „Check Communication” re kattintva ellenőrizzük a csatlakozást majd a „Next” gombra kattintva az alábbi ablakot látjuk:
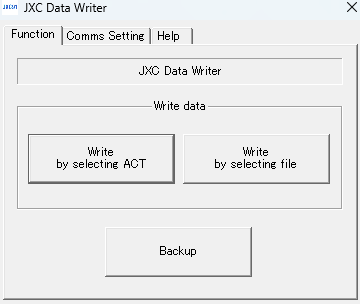
Itt a „Backup”-ra kattintva el tudjuk menteni a beállított paramétereket és a stepdata pozíciókat.
Az új vezérlőre íráshoz a „Write by selecting file” gombra kattintva tudjuk kiválasztani a megfelelő biztonsági mentést.




