Pozícionálás, mikor? mit? Léptetőmotoros szervohajtások az ipar szolgálatában
Mikor? Mit? Gyakran felmerülnek ezek a kérdések pozícionálási feladatok megoldásánál. A különféle gyártógépek, tervezésekor alapvető követelmény, hogy az adott alkalmazást megfelelő minőségben, pontosan és a lehető leggyorsabban hajtsa végre az adott gép vagy gépegység. Ehhez viszont ismerni kell az egyes alkotóelemek tárházát, és ezek ismeretében lehet csak érdemben megfelelő ár-érték arányú, versenyképes berendezést alkotni.
Az automata gépeknek, gépsoroknak működésük közben sok kritériumnak kell megfelelniük. Ilyenkor gondosan mérlegelni kell, milyen eszközöket alkalmazzunk a berendezésben. A mozgó egységek mozgatásáért rendszerint pneumatikus, hidraulikus és elektromos segédenergiával működő berendezések, eszközök a felelősek. Természetesen mindegyik változatnak megvan a maga előnye és hátránya. Ezért találhatók a legtöbbször vegyes rendszerű gépek az iparban. Hogy mikor melyiket alkalmazzuk azt az egyes működtetők pozitívumainak és negatívumainak számbavétele alapján tudjuk helyesen megválaszolni. A legfőbb szempontok: erőszint, pozíciótartás, ismétlési pontosság, sebesség-viszonyok, ár.
A nagy erőtartományt és jó pozíciótartást biztosító hidraulika sok esetben a bonyolultabb kiépítési és karbantartási igénye és a viszonylag alacsony sebesség tartománya miatt szorul háttérbe.
A pneumatikus végrehajtó elemek remek áruk mellett sajnos rendelkeznek azzal a kellemetlen tulajdonsággal, hogy löket közben több pozícióban megállítani megfelelő ismétlési pontossággal csak valamilyen külső egységgel (stopper egységek, fékrendszerek) vagy úgynevezett „air-szervo” rendszerekkel lehetséges. Másik nehéz feladat a levegővel működtetett végrehajtók esetében az egyenletes gyorsulás/lassulás, valamint a nem ingadozó sebesség beállítása.
Az elektromos szervohajtások egy működési tartományon belül, többszöri pontos pozíciót képesek felvenni, sőt a gyorsulás, a sebesség és a lassulás programozása is lehetséges méghozzá rugalmasan. Ezzel együtt viszont bizonyos nyomatéktartományok esetén az ár nagyon magasra szökik és ezért mellőzhetik az alkalmazásukat.
Léteznek hibrid rendszerek is, mikor az elektromos hajtások erejét pneumatikus vagy hidraulikus segéd-aktuátorokkal növelhetjük meg. Ugyanakkor, ha nincs szükség hatalmas erőkifejtésre, van egy másik lehetőség, hogy egy mozgástartományon belül fix pozíciókkal, beállítható gyorsulással és lassulással, megfelelő és ingadozásmentes sebességgel pozícionálhassunk elérhető áron. Természetesen továbbra is azt kell szem előtt tartanunk, hogy elkerüljük az „ágyúval verébre” effektust, azaz próbáljuk meg optimálisan az alkalmazáshoz igazodni. Ezt a feltételrendszert elégítik ki a léptetőmotoros szervohajtások.
A hidraulikus és pneumatikus végrehajtó elemek széles választéka és különböző változataik már sokak számára ismertek. Ha viszont valaki elektromos hajtást említ, akkor a legtöbben a 230VAC, 1 fázisú vagy 400VAC, 3 fázisú megtáplálású szervovezérlővel rendelkező szinkron vagy aszinkron szervomotoros hajtásra gondolnak, de mára kibővültek a tervezők lehetőségei. Alacsony terheléssel rendelkező elektromos lineáris egységek esetében lehetőség van 24VDC léptetőmotoros szervohajtások (hibrid szervók) vagy 24V-os aszinkron szervomotorok használatára.
A különböző motorok működését nem taglaljuk, de a különbözőségükből adódó jellemzőkkel tisztában kell lennünk. Ilyen például a nyomatéktartomány a sebesség függvényében, a programozási lehetőségek, a pontossági paraméterek és az ár.
A nyomatéktartomány tekintetében látható (1. ábra), hogy a léptetőmotoros végrehajtó elemek esetén csak alacsony sebességnél érhetünk el nagy nyomatékot, míg a szervomotorok tekintetében a rendelkezésre álló nyomaték a névleges fordulatszám eléréséig állandónak tekinthető. Sokszor azt a következtetést vonják le ez alapján, hogy a léptetőmotoros egységek nem elég hatékonyak. Pedig pont ebben rejlik a dolog lényege! Kis terhelésű elektromos mozgatásoknál tetemes költségmegtakarítást érhetünk el, hiszen a két típusú motor között az árkülönbség többszörös is lehet. Alacsony teljesítményeknél a léptetőmotor előállítása gazdaságosabb.
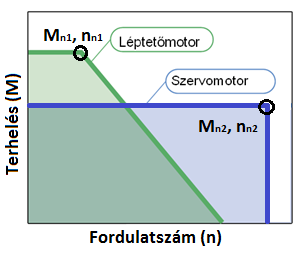
1. ábra
A programozási lehetőségek tekintetében beszélhetünk impulzussorozatos vezérlésről (2. ábra), a hajtásvezérlő memóriájában letárolt mozgásprofilok digitális I/O-kon való meghívásáról (3. ábra), illetve direkt pozicionálásról terepi buszon keresztül (4. ábra).
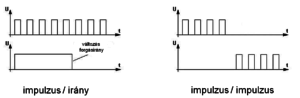
2. ábra
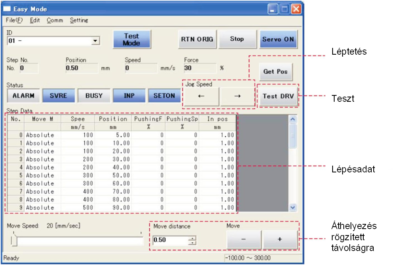
3. ábra
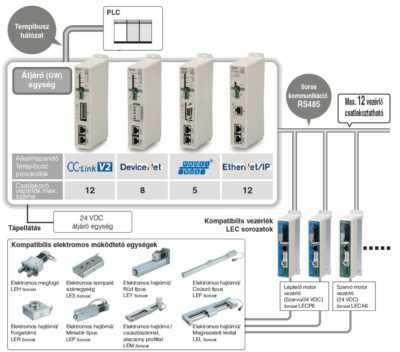
4. ábra
Az impulzussorozatos vezérlés esetén a villamos hajtás mondhatni erősítőként üzemel. Az impulzusok frekvenciája határozza meg a sebességet, a pozíciót pedig az impulzusok darabszáma. Mivel a motorokat két irányba is szükséges forgatni, így szükség van két csatornára. A két csatorna működhet impulzus/impulzus vagy impulzus/irány szerint.
Ha a vezérlő alkalmas rá, akkor egy külső eszköz (PC+szoftver vagy kézi betanító) segítségével a memóriába rögzíteni lehet mozgásprofilokat.Ezeket (általában 24V-os jelszintű) digitális ki- és bemeneteken keresztül meg lehet hívni és ezen keresztül ad visszacsatolást az állapotáról egy felettes szerv felé. Ezek a profilok később módosíthatók az említett eszköz segítségével.
A terepi buszos kommunikáció lehetővé teszi a közvetlen pozícióra küldést és az arról való értesítést, a pozíció visszacsatolást. Ennek a rendszernek fő előnye a rugalmasság. A felettes eszköz tárolja a mozgásprofilokat, így ezek száma gyakorlatilag végtelen. Lehetőség van diagnosztikára. A hibakódok terepi buszon keresztüli kiolvasása pontosabb információt ad a gépkezelőnek, karbantartásnak a probléma megoldásához, jövőbeni esetek kiküszöböléséhez.
Az említett módok vagy azok kombinációja alapján állíthatók be az 5. és 6. ábrán látható mozgásjellemzők.
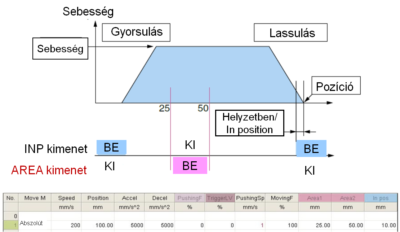
5. ábra
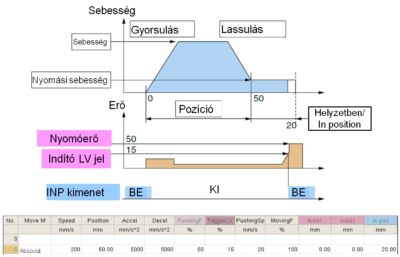
6. ábra
A pontossági paraméterek tekintetében fontos tisztázandó tény, hogy mi is maga a villamos hajtás. Ugyanis sokan hajlamosak csak a motort azonosítani a hajtással, pedig ez egy egységként működő rendszer. Tehát az elektromos hajtás áll egyrészt a motorból, másrészt egy mechanikai szerkezetből, amely a kívánt mozgást hozza létre a motor forgó mozgásából, valamint ezen részek összehangolására alkalmas vezérlőből. A végelem mozgatását a legtöbb esetben golyós orsós (7. ábra) vagy szíjas hajtás (8. ábra) felelős.
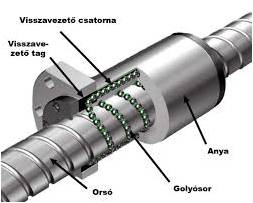
7. ábra

8. ábra
Ez több szempontból nagyon fontos lehet. Itt van például a már említett pontosság. Így tehát az elektromos hajtások pontosságát három tényező befolyásolhatja. Az első a „Positioning repeatability” (ismétlési pontosság), ami a teljes rendszer beállási pontossága. Megmutatja, hogy többször ugyanabból az irányból mekkora pontossággal áll be ismételten ugyanabba a pozícióba a hajtás. A második a „Backlash” (holtjáték). Ha van mechanikai áttétel a rendszerben, annak lehet holtjátéka (pl.: csigás áttétel, fogaskerékpár kapcsolat, stb.). A harmadik pedig a „Lost motion” (elvesztett mozdulat). Ez a meghajtás felőli mechanikai pontatlanságot jelenti. Szíjas erőátvitel esetén például a szíj feszességéből adódó út-veszteség, ami a mechanikai kialakítás végén levő kocsi vagy asztal pontosságát befolyásolhatja. Ezek alapján belátható, hogy nem csak a motor függvénye a pontosság és csak azért mert léptetőmotorral hajtott lineáris egységek, még nem feltétlenül lesz pontatlanabb.
Szerkezeti kialakításukat tekintve természetesen számtalan elrendezési mód lehetséges, amelyek a 10. ábrán láthatók, de a főbb jellemzőket megtekinthetjük a 9. ábrán bemutatott párhuzamos motor elhelyezésű golyósorsós tolórudas lineáris végrehajtó elemnél.
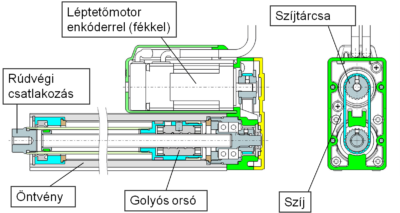
9. ábra

10. ábra
Fontos tisztázni, ami ennél a hajtásnál jól látható, hogy habár a motor szíjjal adja át a mechanikának a nyomatékot, a végelem mozgatását golyósorsó végzi. Így a hajtás golyósorsós és nem szíjas, még ha van benne szíj is. Ez a motor indulásakor ad némi rugalmasságot a mechanika megmozdulásának. Az esetek többségében szintén rugalmas kapcsolatot alkalmaznak a tengelykapcsolókkal rendelkező hajtásoknál is.
Egy fontos fogalom talán még nem tisztázott. Ez pedig, hogy mi is a „léptetőmotoros szervohajtás” elnevezés. Hiszen léptetőmotoros hajtásokról már sokat hallottunk, de hogya
n érdemelheti ki a szervo besorolást? A hagyományos léptetőmotoros hajtás „csak” magából a motorból, egy léptetőmotor vezérlőből és egy meghajtott mechanikából áll. Így viszont a pozícióra állás tényleg „tisztán” vezérlés alapján történik, mégpedig a motor a kívánt pozíció eléréséig szükséges lépésszámának megadása alapján. Így előfordulhat a step motorokra jellemző lépésvesztés. A szervo megnevezést a motorra szerelt enkóder miatt kaphatta meg, mivel ezáltal megvalósul a visszacsatolás a pontos pozícióról. Így megtörténik a szabályzás és ha szükséges a beavatkozás vagy korrekció is. Ezt sok esetben hívják hibrid szervo motornak is.
Tehát az enkóder fontos szerepet tölt be az elektromos hajtásoknál, mivel ezek segítségével kapunk visszajelzést a helyes pozíció felvételéről, a sebességről és a forgásirányról.
Az SMC által épített léptetőmotoros elektromos hajtásokon inkrementális vagy növekményes forgásjeladó (11.ábra) van. Használatakor minden bekapcsoláskor a rendszerrel fel kell vetetni egy referenciapontot, referencia értéket. A szervovezérlő ehhez viszonyítva állapítja meg az elmozdulás értékét az impulzusok száma és a forgásirány függvényében.
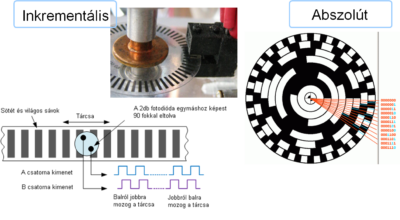
11. ábra
A teljes rendszer abszolúttá tételéhez általában egy külső energiaforrást (akkumulátor) használnak, amely az enkódert és a pozíciószámláló egységet energiával látja el abban az esetben, amikor a tápfeszültség nem áll rendelkezésre. Így a motorvégi enkóder szempontjából lehet akár inkrementális is egy abszolút rendszer.
Végül de nem utolsó sorban, példaként nézzük meg az elektromos hajtás rendszer általános felépítést 12. ábrán.
Természetesen minden esetben körültekintően kell kiválasztanunk a megfelelő hajtást, amely kielégíti az alkalmazásunk igényeit figyelembe véve erőforrásainkat. Éppen ezért tehát érdemes szem előtt tartani az elektromos hajtások esetén a léptetőmotoros, azaz hibrid szervo hajtásokat.
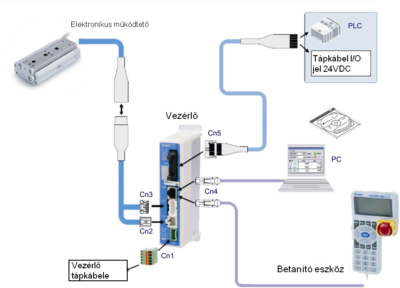
12. ábra
2020. febr. 1.




